
Trois robots Erowa supplémentaires pour six machines
EROWA / IN’TECH MEDICAL
parClassée parmi les leaders mondiaux de son secteur, In’tech Medical conçoit et fabrique des instruments et implants chirurgicaux pour les groupes internationaux de l’orthopédie et de la traumatologie. Poursuivant sa croissance, In’tech Medical s’appuie sur des sites de fabrication dont celui de Toulon-La Farlède qui constitue un modèle de performance et de productivité. Tournée vers l’amélioration continue notamment grâce au concept évolutif Erowa FMC, cette unité de production emploie 86 salariés contre 35 en 2008 et dispose entre autre de treize centres d’usinage 5 axes, tous robotisés. L’occasion nous est donnée de prendre la mesure de cette maîtrise industrielle avec la création de trois cellules équipées de robots multi-machines en octobre 2014, composées pour moitié de trois centres d’usinage Mikron UCP 600 précédemment robotisés en solo et de trois centres DMG neufs dont deux DMU40 Evo linea et un DMU60 Evo linea.
La performance industrielle s’inscrit au cœur du projet de In’Tech Medical (Toulon). Cette unité de fabrication au service de donneurs d’ordres internationaux est confrontée à un contexte concurrentiel sans frontière, un dictat à ne pas négliger. « Il n’est pas envisageable de permettre l’arrêt d’un centre d’usinage pendant tout un week-end, pour la simple raison que notre rentabilité en production serait impactée. Aussi, nous veillons à conserver environ soixante heures d’autonomie sur chacune des machines » assure Eugenio Dolci, le directeur technique.
L’organisation de production est structurée pour un fonctionnement continu de l’atelier 7J/7 et 24h/24. En amont, neuf stations FAO ont pour mission de créer et d’optimiser les stratégies d’usinage. La programmation se conçoit avec un seul et même référentiel de positionnement des palettes sur machines. Le système de centrage Erowa avec une précision de répétabilité à +/- 0,001 mm est le standard commun à tout l’atelier.

Les 6 machines en lignes constituent 3 îlots ergonomiques robotisés pour une rentabilité opérationnelle maximaletive
Une gestion des flux optimisée avec FMC Lean Erowa
Dans l’atelier, le processus de fabrication et de gestion des flux est optimisé de la prise du brut jusqu’à l’usinage complet des pièces. Celles-ci sont réalisées en lots d’une taille moyenne de 20 unités. Issu du concept FMC Lean Erowa, le principe d’une production flexible régit l’ensemble du processus. Une fois le débit matière effectué, tous les bruts sont positionnés dans une cellule robotisée par Erowa pour le dressage de la face d’appui qui servira de référentiel pour l’usinage des 5 faces suivantes. Le chargement – déchargement est effectué par un robot poly articulé dont la rapidité d’exécution correspond au cycle court d’usinage. Les temps morts machines sont minimisés. Le flux des pièces destinées à tout le parc machines s’effectue sans goulot d’étranglement, et permet de maintenir les soixante heures d’autonomie nécessaires à chacun des centres d’usinage pour le travail du week-end. Grâce au logiciel EMC Erowa de pilotage des cellules flexibles, la gestion de production dispose en temps réel des informations nécessaires pour répartir la charge de production en tenant compte des capacités machines, de leur disponibilité et de la présence des outils adaptés.
Au pied de chaque cellule d’usinage, l’opérateur est le véritable pilote de son unité de production. Il organise son plan de charge : maximiser les temps d’usinage sans présence opérateur (nuits et week-end), apporter du soin sur l’exécution de la première pièce d’une série puis programmer l’usinage des pièces suivantes la nuit ou le week-end, peaufiner les réglages d’une nouvelle pièce à partir du programme FAO mis à sa disposition, gérer des urgences et réaliser les pièces « non robotisables ». Le logiciel EMC Erowa constitue une interface opérateur intuitive très pratique puisqu’il gère en temps réel la disponibilité machines, programmes, outils et magasin.
❝La production est d’abord une affaire de neurones, les robots et les machines se chargent de faire le reste plus rapidement ❞
La disponibilité de l’opérateur est indispensable pour effectuer ses missions avec la meilleure sérénité : réglage, métrologie (autocontrôle), nettoyage pièces et de la cellule… Les matériaux usinés sont principalement des aciers inox (outillage chirurgical), titane et chrome-cobalt (implants). Dans ces matériaux difficiles, certaines pièces comportent des usinages délicats présentant des risques outils. Par expérience, les opérateurs équilibrent et organisent leur travail personnel en jonglant avec l’autonomie de travail de la machine.
Ce qui impressionne et constitue la pierre angulaire du développement harmonieux de cet atelier, souligne Eugenio Dolci, est la cohésion du personnel de l’atelier. « Bien organisée, bien pensée, la production est d’abord une affaire de neurones, les robots se chargent de faire le reste avec les machines. Nous veillons à développer et à entretenir un esprit d’équipe et d’entraide. Chaque opérateur travaille dans un environnement de confiance pour échanger et recevoir de ses voisins ce qui lui permet de réussir. Nous intégrons régulièrement des jeunes sortis de l’école dans les équipes. Nous leur apportons une formation et une vision d’ensemble sur notre fabrication. Mais c’est au pied des machines, dans « l’arène », que ce finalise l’accompagnement des opérateurs. Chacun sait pourquoi il travaille et tous contribuent à apporter le petit plus qui améliore nos résultats. »

Ilot DMU60 Evo
Une efficacité opérationnelle impressionnante
Un focus doit être fait sur la production de week-end. Celle-ci représente près 63 heures (soit au moins 2 800 heures par an) d’usinage à utiliser. Il faut compter un temps d’usinage par pièce de l’ordre de 30 minutes ou plus. Cela suppose en amont une bonne organisation tout au long de la semaine sur chaque poste pour identifier les travaux les plus adaptés. Un minimum de surveillance du parc machines permet de suivre le fonctionnement des cellules jusqu’à la prise de poste du lundi matin. Au moment de sa reprise de poste, l’opérateur pourra décharger tranquillement les pièces finies et relancer les nouveaux usinages sans que la machine ait eu besoin de s’arrêter.

Saisie palette coté pièce
In’Tech Medical dispose d’un véritable savoir-faire dans l’organisation de sa production. Cela lui apporte une efficacité opérationnelle et une forte compétitivité au regard des standards de la profession reconnaît Thierry Chardon, le responsable Management projets et applications clients de chez Erowa. Dix-sept ans de robotisation sont passés par là rappelle le directeur technique : « Pour éviter les temps morts de réglage machine, nous avions adopté le système de palette pièce Erowa qui permet le préréglage hors machine. Ceci nous a permis de trouver rapidement nos marques en 1998 lors de l’arrivée du premier magasin de chargement automatisé Erowa. Pour le travail de nuit, il est sûr qu’au début on ne dort pas tranquille. Il nous est arrivé de casser un outil en ébauche. Pour autant nous avions gagné quatre ou cinq heures d’usinage et pris une leçon à bon compte. A chaque fois nous avons progressé. Avec l’expérience, on minimise les risques pour, au final, produire sans risque. Depuis cette date aucune machine n’est rentrée dans l’atelier sans être équipée d’une palettisation automatisée. »
.
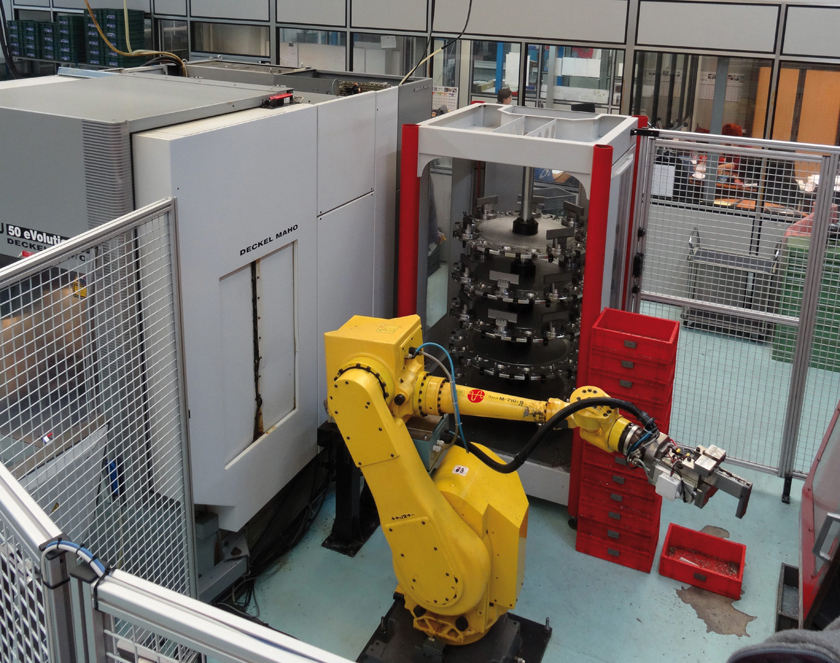
Robot polyarticulé Erowa – dressage des ébauches
Un robot pour deux machines : un pas de plus dans l’efficacité et la rentabilité
Aujourd’hui, tous les robots Erowa sont encore en activité. Mais grâce aux équipements de standardisation, d’automatisation et de pilotage totalement évolutifs de Erowa, l’atelier In’Tech Medical poursuit sa démarche d’amélioration continue avec une croissance à deux chiffres ces dernières années. La mise en place de trois unités de robots multi machine en octobre 2014 marque une nouvelle étape. Selon l’avis d’Eugenio Dolci, il s’agit de dupliquer une solution éprouvée tout en améliorant le concept.
Avec un magasin de dix emplacements PC 210 et soixante positions ITS 50, chaque robot Multi dessert un centre Mikron 5 axes à sa droite et un centre DMG à sa gauche. On peut ainsi mieux gérer l’autonomie mise à disposition des deux machines en mutualisant leur stockage composé en partie de pièces longues et de pièces courtes. Le pilotage des deux machines situées de façon proche est plus ergonomique et le retour sur investissement du robot, bien meilleur.
N° 64 mars 2015